Ada/Mindstorms 3.0: A Computational Environment for
Introductory Robotics and Programming
Barry Fagin
Department of Computer Science
US Air Force Academy
Colorado Springs, CO
www.faginfamily.net/barry
barry.fagin@usafa.af.mil
INTRODUCTION
The possibilities of robots
in the classroom have intrigued educators for as long as robots have been a
part of our culture. Economic
constraints, however, demanded patience on our part: robots were initially too expensive and too
difficult to work with for large-scale classroom use. Initial attempts to capitalize on robots as
teaching tools had to instead rely on software models: the use of physical devices was simply not
possible [1].
Over time, however, technology becomes
better, cheaper, and easier to use. If
we are patient, devices originally suited only for research labs and highly
trained specialists may become cheap enough and user-friendly enough for
classroom use. We believe this is now
the case with robots.
One well
known example of affordable, mass-produced robotic technology is the
Lego Mindstorms1 RCX programmable “brick” and associated hardware,
shown in Figures 1 and 2. The brick is a
wallet-sized plastic block built around a Hitachi microcontroller, with an infra-red
port, input and output ports, and an LCD display. The support hardware includes wheels, wires,
gears, and hundreds of building pieces.
The microcontroller inside
the RCX can be programmed through the I/R port, making
possible the construction of autonomous robots with fairly sophisticated
behavior. This suggests that the RCX and
similar systems might be used to teach basic
programming and robotics principles.
Many educators are enthusiastically exploring this possibility [2], [3],
[4].
This paper describes one
effort in this area: Ada/Mindstorms 3.0,
a software environment for teaching using the Mindstorms RCX kit. We discuss the design choices made, the
reasons for those decisions, and show examples of how the system works. Ada/Mindstorms
has been used in computing classes at the Air Force Academy and around the world, and is freely available online.
MOTIVATION
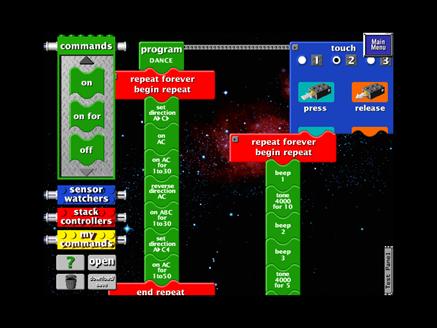
The Lego Mindstorms kit comes
with its own PC-based software development environment, shown in Figure 3. It is a thoughtfully designed visual
programming language, well suited for teaching bright children basic programming
and robotics principles.
Unfortunately, this
environment possesses many deficiencies that make it unsuitable for teaching more sophisticated concepts.
Subroutines cannot have parameters, for example, and variables are not supported. To
remedy this and other deficiencies, a knowledgeable Lego user community has
emerged with many alternative Mindstorms programming environments2.
One of the best known of these is Dave Baum’s
Not Quite C, or NQC [6]. NQC makes
high-level language programming possible on the RCX, with support for
variables, subroutines with parameters, and low-level access to the underlying
hardware.
NQC, however, is designed for experienced programmers. Several aspects of NQC make it a poor first
computing language, including relatively unsophisticated error messages and a
command-line development environment. Our goal was to construct a system that would a) leverage the
existing hardware of the RCX, b) leverage the existing software knowledge of
the Mindstorms community, so that we would not have to develop low-level RCX
tools, c) support the teaching of sophisticated computing principles, and d)
provide a high-quality development environment suitable for a student’s first
exposure to computing and robotics.
The result was Ada/Mindstorms.
TECHNICAL OVERVIEW
The technical framework of
Ada/Mindstorms is shown in Figure 4. Programs are written
in an Ada subset plus an API of Mindstorms-specific function
calls. They are then
compiled with the Ada/Mindstorms compiler. This compiler is a fully validated Ada compiler, with additional logic to check that the student’s
program uses only those constructs supported by the Ada/Mindstorms subset. These constructs are necessarily much smaller
than the full Ada language, due to both Ada’s considerable expressive power and the RCX’s
hardware limitations.
One deficiency of many robotics programming environments is the lack of simulation
capabilities. Most educational
institutions cannot permit students to take the robotics kits back to their
rooms to experiment, removing a potentially valuable learning opportunity. We felt this particularly keenly in our
classroom efforts with Ada/Mindstorms 2.0, which had no simulation
capability. Release 3.0 addresses this
problem by providing two execution paths:
simulation and hardware.
If the user’s program is a
valid Ada/Mindstorms program, the compiler will produce 2 files: an Ada linkable file (ALI) for simulation, and an NQC file for the
hardware. The ALI file is a conventional Ada object file, in which the Ada/Mindstorms API calls
point to externally defined routines for an RCX simulator bundled with
Ada/Mindstorms 3.0. When built for
simulation, the simulator libraries are linked with
the user’s program to produce an executable file that displays the behavior of
the RCX brick as the program is running.
If execution on an actual RCX
is desired, the “build” button invokes NQC on the .nqc file produced by the compiler (NQC is also
bundled with Ada/Mindstorms 3.0). It
compiles the .nqc text file it into RCX byte codes, and downloads them into the
RCX. In simulation build mode, the .nqc
file is ignored.
In hardware execution mode, the .ali file is ignored. The current build mode is
set by the user.
Figure 5 shows Ada/Mindstorms
in use. When built for simulation, a
model of the RCX brick appears as shown in Figure 6. The model displays in real time the values of
the outputs (such as motor direction and power level), and permits the user to
enter different inputs appropriate to current sensor configurations. The bottom lines of the screen shot in Figure
7 show the process for downloading actual code into a robot. If the program is valid, the compiler
downloads the translated bytecodes through the RCX I/R
transmitter and reports when the transmission has completed.
TEACHING WITH ADA/MINDSTORMS
AT USAFA
The Air Force Academy is a
4-year nationally accredited undergraduate institution, charged with producing
men and women who will serve as officers in the US Air Force. All graduates receive a Bachelor of Science
degree, in a major subject area of their choosing. Upon graduation, cadets are commissioned as 2nd lieutenants.
All incur a 5-year service commitment when they graduate, but most
remain in the Air Force for a full 20 years of service.
The Academy has an extensive
core curriculum, with required courses in almost every subject area. Accordingly, all cadets (approximately 1,000
in each class) take a required computer science course in either their freshman
or sophomore year. This course is mandatory
for both majors and non-majors, and is thus different from “CS1” offerings at
civilian institutions.
We used Ada/Mindstorms in several
sections of this course during the 2000-2001 academic year3, each
with approximately 20 students (see Figure 8).
The instructional laboratory consists of networked PC’s with
Ada/Mindstorms, 1 Mindstorms kit for every 2 students,
and 1 kit for every instructor teaching a robotics section.
The goal of the Academy’s basic
computing science course is to impart a strong core competency in all aspects
of computing for all future Air Force officers. This competency includes programming
skills. Our experience indicates that
robotics and Ada/Mindstorms can be used to teach many
basic computing and control concepts in new and interesting ways. We show some examples below. These are taken from
actual programming assignments given to freshman cadets at the Academy.
Sequential Control Flow
Sequential control flow is
easy to demonstrate with a robot. Any
series of commands long enough to appear as a
connected list of instructions is very effective. Here is a fragment of Ada/Mindstorms code
that gets a robot with two motors (connected to RCX outputs A and C) to move
forward for 2 seconds, play a sound, go forward again for 1 second, and
stop. Note that the semantics of the
“Output_On” routines start the motors running and then move execution to the
next statement.
--sequential control flow example
Output_On_For(Output
=> Output_A,
Hundredths_Of_A_Second
=> 200);
Output_On_For(Output
=> Output_C,
Hundredths_Of_A_Second => 200);
Play_Sound(Sound_To_Play
=> Up);
Output_On_For(Output
=> Output_A,
Hundredths_Of_A_Second
=> 100);
Output_On_For(Output
=>
Output_C,Hundredths_Of_A_Second
=>
100);
Output_Off(Output
=> Output_A);
Output_Off(Output
=> Output_C);
The sequence of robot actions
matches the sequential progression of code on the page. This provides an experiential encounter with
sequential control flow, and offers a refreshing alternative to more
traditional sequential examples that, for example, accept a number from the
user, go through a series of calculations, and produce a final number on the
screen.
Variables and Constants
Variables can
be taught experientially by having a robot work with a quantity that
changes while it is running. Below is an
Ada/Mindstorms code fragment that does just that, used
in a laboratory that accompanies students’ first lessons on variables. The
quantity changed is the distance a robot travels, to give the student a visual analog
for a variable and to see how changes in its value affect behavior.
Time_Forward : Integer := 500;
Output_On_For(Output
=> Output_A, Hundredths_Of_A_Second
=>Time_Forward);
Output_On_For(Output => Output_C,Hundredths_Of_A_Second
=>
Time_Forward);
Time_Forward := Time_Forward*3/4;
--now the robot goes forward for ¾ as long
Output_On_For(Output => Output_A,Hundredths_Of_A_Second
=>
Time_Forward);
Output_On_For(Output => Output_C,Hundredths_Of_A_Second
=>
Time_Forward);
Constants, of course, are
quantities that do not change while the program is running. The code below shows how to get a robot to
make a 90° turn. This is accomplished by
turning one motor on, and either leaving the other motor off or rotating it in
the opposite direction for a specific amount of time. The amount of time required for an accurate
right turn is represented as a constant:
Turn_Duration : constant integer :=
250;
Output_On(Output
=> Output_A);
Output_Off(Output
=> Output_C);
Wait(Hundredths_Of_A_Second =>
Turn_Duration);
Output_On(Output
=> Output_C);
The need to “fine tune” the value of the constant to get a good 90° turn for different robots
and different surfaces illustrates another purpose of named constants in
programs: maintainability and ease of
modification.
Procedures
Robotics provide
a very natural way to teach procedures: a
procedure is a task you want your robot to do. Accordingly, when students are assigned a robot behavior that requires a series of
smaller tasks, they see very quickly that these subtasks should be written as
procedures. For example, the previous
example can be encapsulated into a “Turn_Right”
procedure that can be used in later assignments as robot behavior becomes more
complex:
Turn_Duration : constant integer := 250;
procedure Turn_Right is
begin
Output_On(Output => Output_A);
Output_Off(Output => Output_C);
Wait(Hundredths_Of_A_Second => Turn_Duration);
Output_On(Output
=> Output_C);
end Turn_Right;
Reaction to External Inputs
What makes robots
interesting, of course, is their ability to react to their environment.
Mindstorms robots can receive
input in a variety of forms, including light intensity, temperature, and a
pulse when an input sensor is pressed.
The latter approach is demonstrated below. Students were given a two-motor robot
equipped with a bumper that sets an input sensor to 1
when pressed. The robot was then tasked to engage in a specific behavior when it
bumps into something:
if Get_Sensor_Value(Sensor =>
Sensor_1) = 1 then
begin
--code for desired behavior here
end;
A
logical choice for the desired behavior is backing up, turning, and going
forward again. The power of decision making in computing can
be dramatically illustrated by downloading one program that causes a
robot to blindly stumble into a wall, and then another that has it back up and
scurry elsewhere.
Vectors/Arrays
The addition of array support
to recent releases of NQC permitted us to include similar support in
Ada/Mindstorms. This gives the robots
considerable power for data collection and emulation. The ability to support arrays can be used, among other things, to write programs for robot
learning. For example, the code fragment
below is from a laboratory exercise where students store a vector of numbers in
the robot through a series of button presses.
The robot then iterates through the array and follows the commands it
finds there.
-- Accept course programming
for Index in 1..Max_Index loop
Get_Touch_Count(Touches =>
Turn_Value);
Turns(Index)
:= Turn_Value;
Num_Points
:= Num_Points + 1;
exit when Turn_Value
>
Turn_Around or Turn_Value <= 0;
end loop;
-- Execute programmed course
for Index2 in 1..Num_Points loop
Turn_Value := Turns(Index2);
Beep_A_Digit(Digit
=>
Turn_Value);
Wait(Hundredths_Of_A_Second
=> 50);
if Turn_Value =
Forward then
null;
elsif Turn_Value
= Right then
Facing_Turn(Direction => Right,Time =>
Turn_90_Duration);
elsif Turn_Value
= Left then
Facing_Turn(Direction =>
Left, Time =>
Turn_90_Duration);
elsif Turn_Value =
Turn_Around
then
Facing_Turn(Direction =>
Right, Time =>
Turn_90_Duration
* 2);
else
Stop;
exit;
end if;
Go_Forward(Time
=> 100);
Stop;
end loop;
Students are thus able to
give robots not just the ability to follow a sequence of commands, but to
follow *any* sequence of commands. They write
what is essentially an interpreter for a robotic programming language that
executes on a robot. We believe this is an impressive achievement for beginning programmers,
particularly for students who will never take another computer science course.
Other features supported but
not described here include iteration, message transmission and receipt with
other RCX’s through the I/R port, and sound.
CONCLUSIONS AND FUTURE WORK
We believe our efforts to
produce a system for using robots in the classroom as a teaching tool were
quite successful: all our design
objectives were met, and the software functions very
well. Students enjoy working with
robots, and instructors enjoy teaching them.
However, robots are not a
solution to every problem. Some concepts
work well with robots, others do not.
The I/O facilities for the RCX, for example, are quite primitive. Graphics are nonexistent, and problems that
require any but the most trivial arithmetic calculations are better suited to
other platforms. These are not
indictments of robots per se, but rather
reflect the economic considerations that went into the design of the RCX. As the technology continues to advance,
perhaps we will see mass-produced affordable robots with more sophisticated
I/O, a more powerful CPU, support for floating point
arithmetic, and so on. Such devices
would further enrich the classroom experience.
There are many features
planned for future releases of Ada/Mindstorms, including support for tasking,
separate compilation, and the addition of a 2-d virtual “world” to the
simulator that would permit the simulation of actual robot designs in target
environments. Lego has recently added
support for image processing with a small Mindstorms camera, suggesting many
exciting possibilities for classroom robotics experiments.
Readers interested in
learning more about Ada/Mindstorms are invited to scan the bibliography. Ada/Mindstorms
requires a PC running Windows and the standard Lego Mindstorms robotics kit. It is available free of charge from www.usafa.af.mil/dfcs/adamindstorms.htm. The software includes the AdaGIDE freeware Ada compiler, all supporting Ada/Mindstorms software, and
NQC.
Support for
this work has been provided by the USAF Institute for Information Technology and Applications, whose
support is gratefully acknowledged.
REFERENCES
[1] R.E. Pattis, Karel the Robot: A Gentle Introduction to the Art Of
Programming, 2nd ed., Wiley 1981.
[2] U. Wolz, “Teaching design and project management
with lego RCX robots,” in Proc. SIGCSE ’01, 2001, p. 95.
[3] R. Harlan et. al. “The
khepera robot and the kRobot class: a
platform for introducing robotics in the undergraduate curriculum,” in Proc.
SIGCSE ’01, 2001,
p. 105.
[4] AAAI-2001 Spring Symposium on
Robotics and Education, March 2001, numerous authors.
[5]
R. Beer and H. Chiel, “Using autonomous robotics to teach science and
engineering”, communications of the ACM, vol. 42 no 6,
pp 85-92.
[6] D. Baum,
The NQC Web site. Available http://www.enteract.com/~dbaum/nqc
[7] B. Fagin, “Using
ada-based robotics to teach computer science ,” in Proc. ITiCSE ’00, 2000, p.
148. Available http://www.faginfamily.net/barry/Papers/ITICSEWeb/using_ada.htm.
[8]
B. Fagin, “An
ada interface for lego mindstorms,” Ada Letters, Volume
21 No 2, September 2000. Available http://www.faginfamily.net/barry/Papers/AdaLetters.htm.
[9] B. Fagin, “Teaching basic
computer science concepts with robotics using ada/mindstorms 2.0,”
in Proc. SIGAda ’01, 2001. Available http://www.acm.org/sigada/conf/sigada2001/.
FOOTNOTES:
1 Mindstorms™ and RCX™ are registered trademarks of
Lego Corporation.
2 See www.lugnet.com
for examples.
3 The author was on sabbatical during the 2001-2002
academic year.